-
이메일
hengleyiqi@163.com
-
전화
18340091069
-
주소
산동성 제남시 중구 경십서로
제품 카테고리
제남항락흥과기기유한공사

개요
로켓 회수 젓가락 집게 시험 시스템 -HJHS01$r$n$r$n 우주 회수 집게 실험 장치 -HLZZ$r$n$r$n 로켓 회수 집게 시험 시스템 -항락 기구 $r$n$r$n 로켓 회수 집게 시험 시스템 $r$n$r$n 로켓 회수 집게 시험 시스템 $r$n 로켓 회수 집게 실험 장치
제품 정보
로켓 회수 젓가락 집게 시험 시스템 - HJHS01
우주 회수 클립 실험 장치 - HLZZ
로켓 회수 클립 시스템 - 항락 기기
로켓 회수 클립 시험 시스템
로켓 회수 젓가락 집게 시험 시스템
로켓 회수 클립 실험 장치
우주 회수 클립 시험 시스템

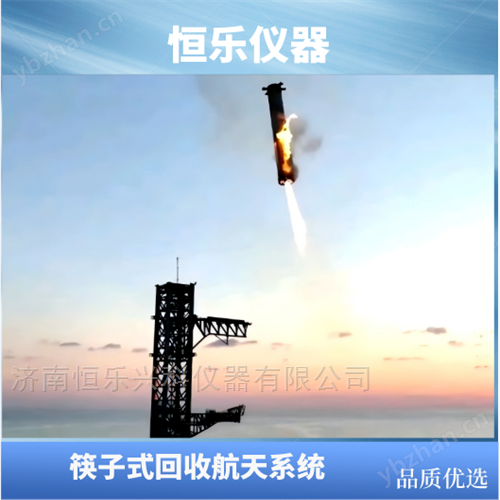
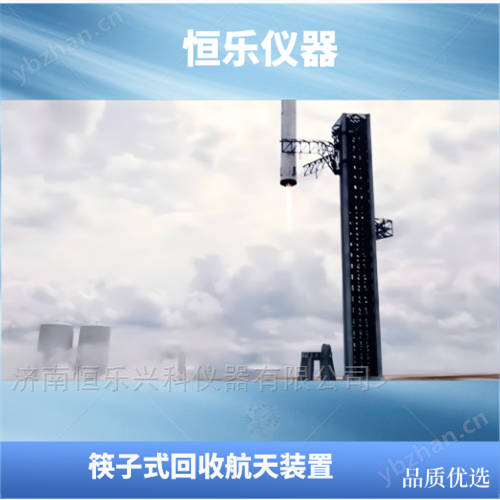
로켓 회수 젓가락 집게 시험 시스템 - HJHS01,두 개의 거대한 로봇 팔처럼, 그것들은 발사대의 양쪽에 설치되어 있으며, 마치 두 개의 유연한"젓가락"과 같다.임무를 마치고 지상으로 돌아오면 자동으로 자세를 조정해 발사대 상공으로 천천히 날아간다.그것이 발사대에 접근하는 순간, 이 로봇 팔은 정확하게 뻗어나와 젓가락으로 만두를 집듯이 조심스럽게 huojia를 끼워 발사대에 안정적으로 떨어지게 하고, 스스로 힘들게 착륙할 필요가 없다.이 장치는 사실 첨단 기술의 인형 뽑기 기계이다.다음과 같은 몇 가지 과학적 원리에 의존합니다.
(1) 계산: 기계팔은 반드시 huojian의 비행속도, 방향과 고도를 계산하고 제때에 위치를 조절하여"젓가락"이 huojian을 받을수 있도록 보장해야 한다.이것은 인형 뽑기 기계의"발톱"이 인형의 머리를 조준해야하는 것과 같습니다.
(2) 자세 제어: huojian은 착륙할 때 자신의 각도와 속도를 조절하여 자신이 천천히, 곧게 아래로 미끄러지도록 해야 한다.마치 농구를 할 때 팔의 각도와 강도를 잘 조절하여 공이 바구니에 들어갈 수 있도록 해야 한다.
(3) 피드백 시스템: huojian과 로봇 팔은 모두 센서를 장착하여 환경 변화에 신속하게 반응할 수 있다.일단 huojian이 예정된 궤도를 약간 벗어나면 시스템은 즉시 수정하여"젓가락"과 도킹하도록 확보한다.
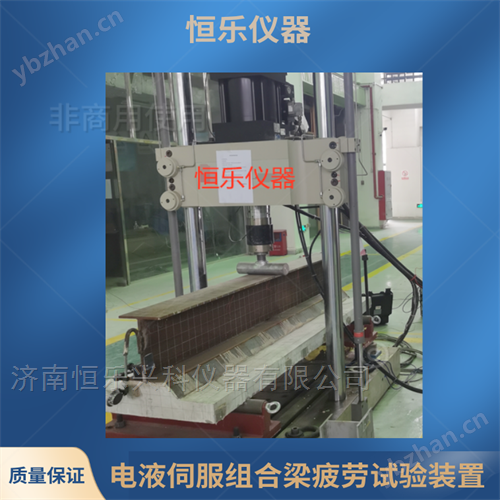
2. 기술 매개 변수
1) 작동기: 오버홀 지름 60mm, 모듈식 설계.
2) 작동기의 정격 추력: 500kN;
3) 부하 센서: 고정밀 바퀴살식 부하 센서;
4) 하중 측정 범위 및 해상도: 4~100% FS, 하중 측정 해상도: 0.1kN;
5) 부하 측정 정밀도: 4~100% 범위에서 ±1% 를 나타냅니다.
6) 로드 정격 여정: 200mm;
7) 기울기 센서의 각도 해상도는 0.01도보다 높습니다.
8) 작동기 정격 속도: 2.5mm/s;
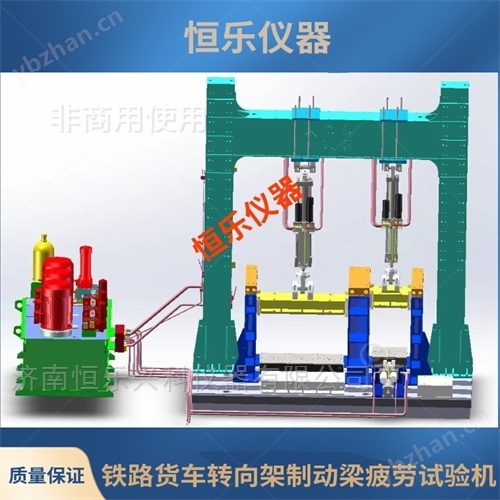
3. 정적 전액 서보 탑재 작동기
1, 20000kN 수직 전액 서보 로드 작동기, 추력: 20000kN, 당김: 6000kN, 여정: 600mm.(±300mm);
2. 메인 프레임 단측 수평 방향 전액 서보 로드 작동기, 추력 6000kN, 인장 4000kN; 여정 ± 400mm.
4. 제어 시스템
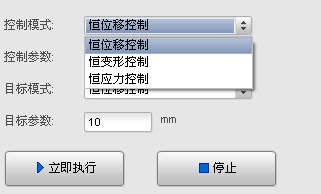
1.다기능 역학 로드 제어 시스템 소프트웨어 및 컨트롤러 세트, 소프트웨어의 주요 기능은 항응력 제어, 항위 이동 제어, 항변형 제어, 일정한 순환 단계를 설정할 수 있습니다.또한 다양한 제어 방식 간에 충격 없는 변환을 실현하여 전자동 폐쇄 루프 제어를 실현할 수 있다.최소 4단계로 변위, 하중, 응력 및 유지 시간을 제어할 수 있습니다.
2. 실험 단계의 종료 조건, 선택할 수 있다: 하중 값, 변위 값, 변형 값, 응력 값, 응변 값, 하중 감쇠율, 하중 증량, 변위 증가, 변형 증량, 응변 증량, 감쇠 하중 값 등, 이 조건에 도달하면 자동으로 실험을 중지하고 데이터와 곡선을 자동으로 기록한다.

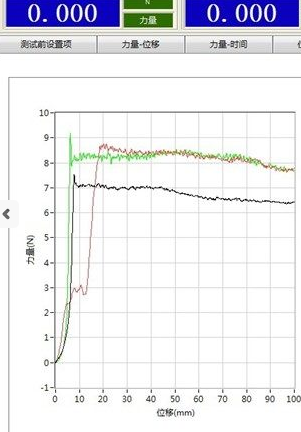

3.소프트웨어는 시험 데이터 시각화 디스플레이 기능을 가지고 있다.시험 과정에서 실시간 시정 곡선, 정지 곡선, 수치 디스플레이 및 구조 진동 애니메이션을 할 수 있다.
항락흥과는"품질*"의 기업정신을 견지하고 신의성실을 근본으로 하며 과학기술혁신으로 발전을 추구하며 열정으로 사용자에게 완전한 시험시험해결방안을 제공한다.
항락흥과사명:"추구*, 과학기술진흥", 민족공업진흥을 위해 끊임없이 노력하자!